将机器人移动到“p10”位置点;

在ABB机器人的操作中有一个方法可以将机器人快速移动到已知的位置点,操作方法如下:
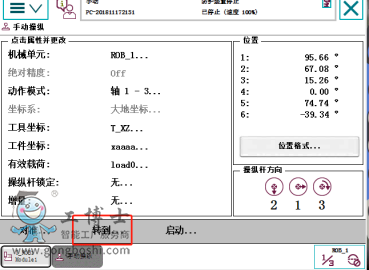
1) 将机器人示教器界面切换到手动操作界面,点击“转到...”;
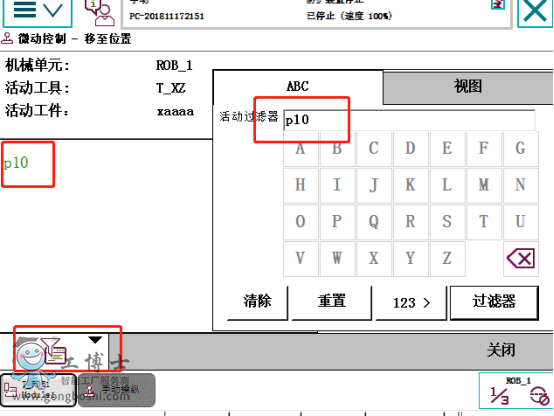
2) 通过过滤按钮搜索到要移动到的位置点“p10”:
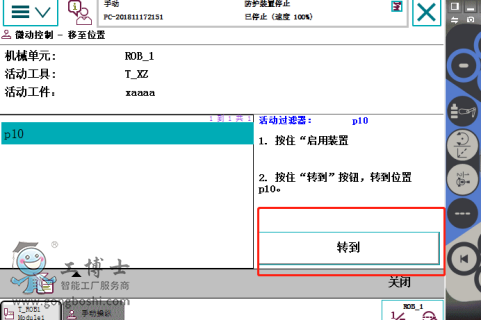
3)选中要移动的位置点“p10”,一直按住“使能键”,然后一直点住“转到”按钮,机器人就可以运动到“p10”位置点。
- 下一篇:你对ABB机器人有多少了解呢
- 上一篇:ABB机器人电路板短路应该怎样维修?
ABB工业机器人配件

 联系我们
联系我们
 联系方式 联系方式
友情链接新闻分类
|
新闻中心 ABB机器人如何快速转到位置点介绍
发布时间:2020-08-21 浏览次数:861 返回列表
如果需要将ABB机器人移动到某个已知的位置点时,操作步骤一般是建立一个程序,然后在程序里面编写一条运动语句,然后运行该程序将机器人移动到已知的位置点(如下图);
将机器人移动到“p10”位置点; 在ABB机器人的操作中有一个方法可以将机器人快速移动到已知的位置点,操作方法如下: 1) 将机器人示教器界面切换到手动操作界面,点击“转到...”; 2) 通过过滤按钮搜索到要移动到的位置点“p10”: 3)选中要移动的位置点“p10”,一直按住“使能键”,然后一直点住“转到”按钮,机器人就可以运动到“p10”位置点。
|
联系热线:17521388922(微信) 联系人:罗工 联系地址:上海市嘉定区南翔镇
技术和报价服务:星期一至星期六8:00-22:00 ABB工业机器人配件