

 联系我们
联系我们

- 机器人到达home点输出DO信号ahome。

设置一个home点DO输出信号,信号的等级为只读。

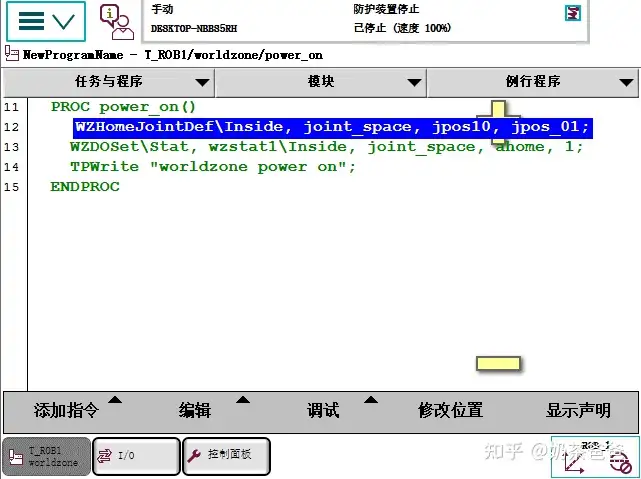
编写worldzone程序模块,建立名为power_on的例行程序。
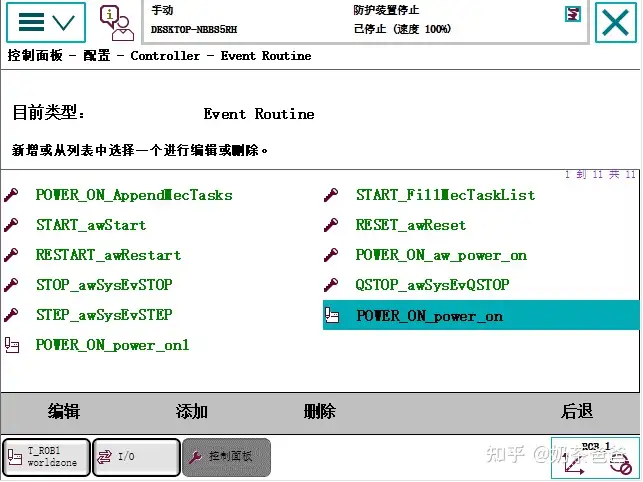

将建立的例行程序power_on在Event Routine中新建与Power On关联,重启后功能有效。机器人回到home点,检查DO信号ahome是否输出信号。
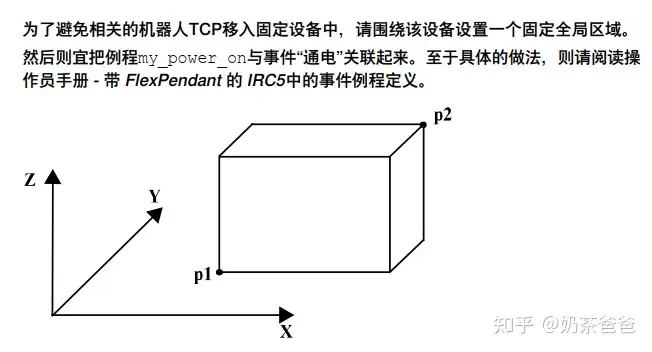
- 机器人进入空间区域后,输出DO信号DO_8。
如上方法建立输出信号DO_8。建立例行程序。


将建立的例行程序power_on1在Event Routine中新建与Power On关联,重启后功能有效。机器人进入空间区域,检查DO信号DO_8是否输出信号。
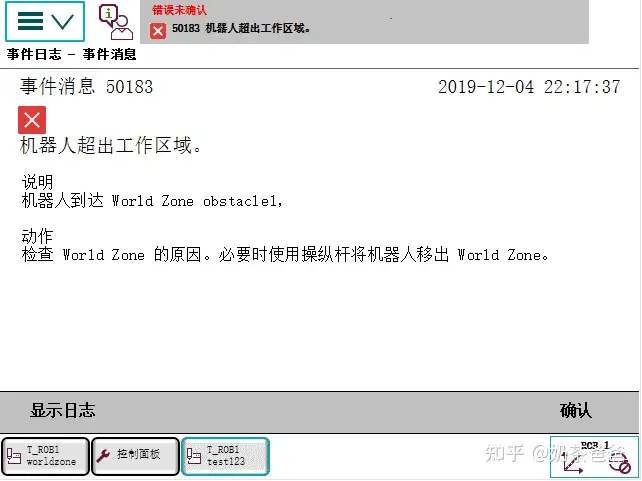
- 机器人进入安全区域并报警,并停止运动。
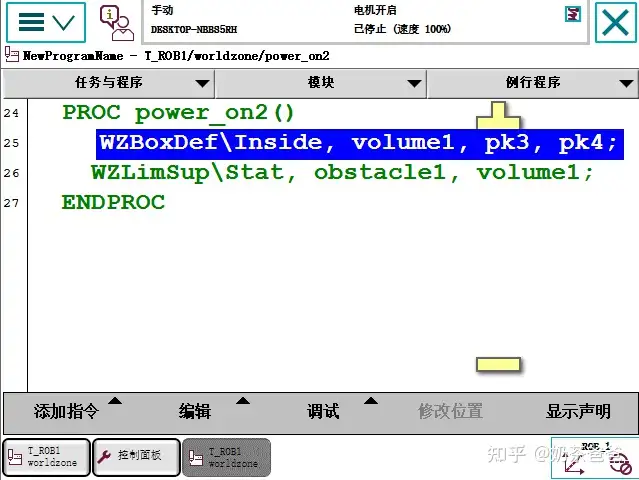
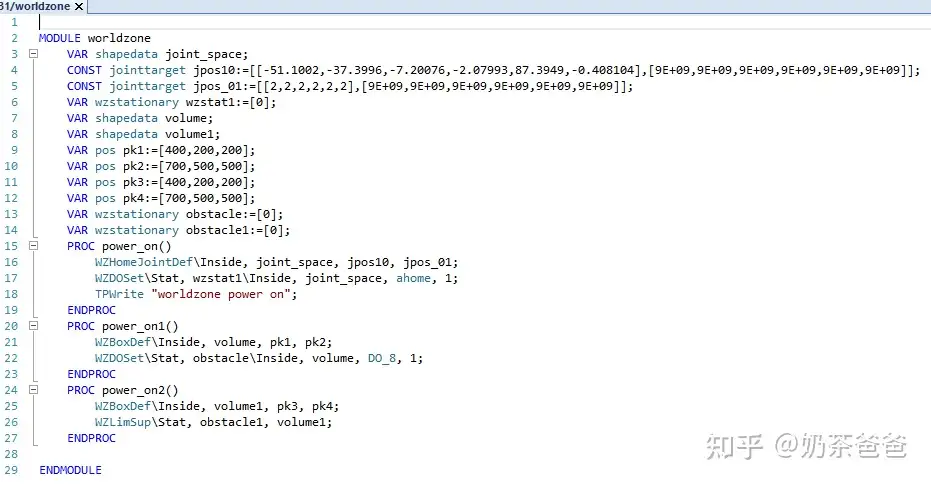

将建立的例行程序power_on2在Event Routine中新建与Power On关联,重启后功能有效。机器人进入空间区域,机器人报警,并停止。
文件来自网络 侵 删
了解更多信息请咨询:ABB机器人