


5)执行后,可以查看对应点位数据,发生变化

上图为在wobj0下

上图为workobject_1下
了解更多ABB机器人
文章来源网络,如有侵权请联系删除
ABB工业机器人配件

 联系我们
联系我们
 联系方式 联系方式
友情链接新闻分类
|
新闻中心 机器人点位批量在不同坐标系下的转化——ABB机器人
发布时间:2023-03-10 浏览次数:207 返回列表
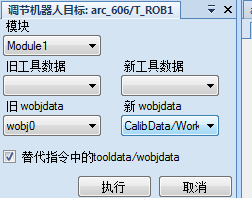
1)建程序的时候,所有点均在wobj0坐标系下(wobj0坐标系也可不写),如下图
5)执行后,可以查看对应点位数据,发生变化 上图为在wobj0下 上图为workobject_1下 了解更多ABB机器人
文章来源网络,如有侵权请联系删除 |
联系热线:17521388922(微信) 联系人:罗工 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 ABB工业机器人配件